Laboratory 2 - Estimation, filtering and system identification - Prof. M. Taragna
Parametric estimation of a position transducer model using the Set Membership approach
Contents
- Introduction
- Procedure
- Problem setup
- Parametric estimation of a linear model (w.r.t. data) using least squares
- Evaluation of estimate uncertainty intervals EUI in l-infinity norm
- Evaluation of parameter uncertainty intervals PUI and central estimate in l-infinity norm
- (Optional) Evaluation of an approximation of the feasible parameter set FPS
Introduction
The program code may be splitted in sections using the characters "%%". Each section can run separately with the command "Run Section" (in the Editor toolbar, just to the right of the "Run" button). You can do the same thing by highlighting the code you want to run and by using the button function 9 (F9). This way, you can run only the desired section of your code, saving your time. This script can be considered as a reference example.
clear all, close all, clc
Procedure
- Load the file sensor.mat containing the position/voltage data
- Plot the voltage measurements versus the position measurements
- Estimate the parameters of the linear approximation using least squares
- Plot the estimated approximation versus the experimental data
- Compute the estimate uncertainty intervals EUI in l-infinity norm
- Plot the EUI versus the estimated approximation
- Compute the parameter uncertainty intervals PUI in l-infinity norm
- Compute the parameter central estimate in l-infinity norm
- Plot the PUI and the central estimate versus the experimental data
- (Optional) Compute an approximation of the feasible parameter set FPS
- (Optional) Plot PUI and FPS approximation versus the estimated parameters
Problem setup
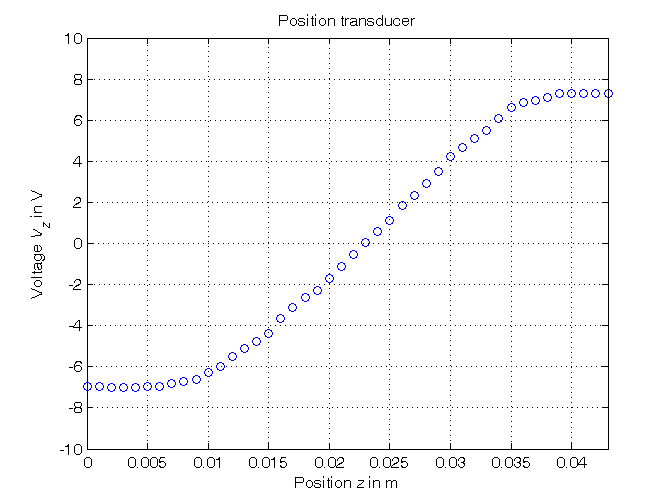
% Step 1: load of data load sensor % z = position measured in meters, without position offset % Vz = voltage measured in volts % Step 2: plot of data figure, plot(z,Vz,'o'), axis([min(z),max(z),-10,10]), grid, title('Position transducer'), xlabel('Position{\it z} in m'), ylabel('Voltage{\it V_z} in V')
Parametric estimation of a linear model (w.r.t. data) using least squares
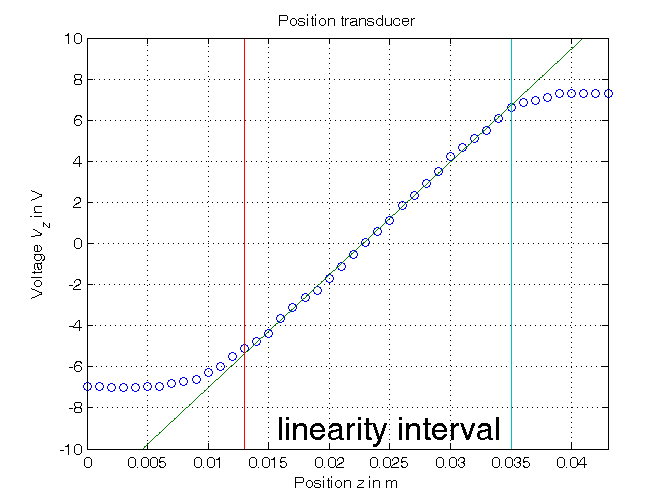
% Step3: computation of the parameter estimate % definition of the linearity interval of the characteristic i1=14; % z(11) = 0.01, z(14) = 0.013; use: i1=11 (at first), i1=14 (at the end) i2=36; % z(36) = 0.035 z_lin=z(i1:i2); Vz_lin=Vz(i1:i2); N_lin=length(z_lin); % parameter estimation by means of least squares algorithm Phi=[Vz_lin, ones(N_lin,1)]; p=Phi\z_lin; % Form #1: using the "\" operator (more realiable) Kt=1/p(1) Vo=-p(2)/p(1) A=pinv(Phi); % more realiable than inv(Phi'*Phi)*Phi' p_=A*z_lin; % Form #2: using the pseudoinverse matrix Kt_=1/p_(1) Vo_=-p_(2)/p_(1) % Step 4: graphical comparison of the results Vz0=linspace(-10,10,1000); z_hat=p(1)*Vz0+p(2); figure, plot(z,Vz,'o', z_hat,Vz0,'-', ... z_lin(1)*[1,1],[-10,10],'-', z_lin(end)*[1,1],[-10,10],'-'), axis([min(z),max(z),-10,10]), grid, title('Position transducer'), xlabel('Position{\it z} in m'), ylabel('Voltage{\it V_z} in V'), text(0.015,-9,'\fontsize{20} linearity interval')
Kt = 549.6215 Vo = -12.5263 Kt_ = 549.6215 Vo_ = -12.5263
Evaluation of estimate uncertainty intervals EUI in l-infinity norm
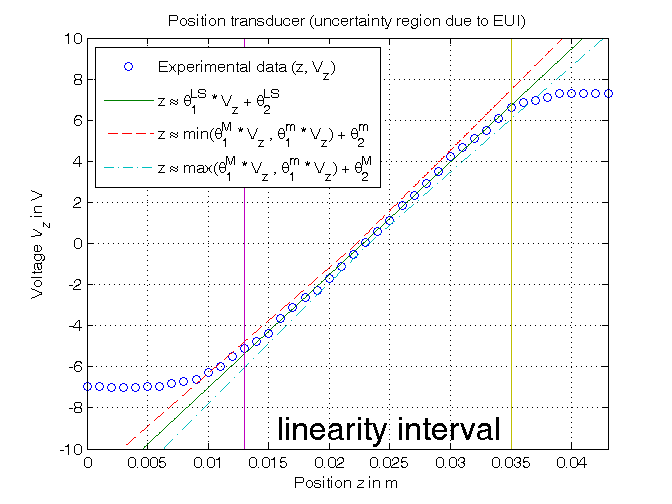
% Step 5: computation of the estimate uncertainty intervals EUI in l-infinity norm % bound on the greatest measurement error of the position z format compact, format short e epsilon=0.5e-3 % EUI algorithm in compact form for ind=1:length(p), p_min(ind,1)=A(ind,:)*(z_lin-epsilon*sign(A(ind,:))'); end p_max=2*p-p_min; EUI=[p_min, p_max] % EUI algorithm in extended form, using a loop (equivalent) p_min_=zeros(size(p)); ; p_max_=zeros(size(p)); for k=1:length(A), p_min_(1)=p_min_(1)+A(1,k)*(z_lin(k)-epsilon*sign(A(1,k))); p_min_(2)=p_min_(2)+A(2,k)*(z_lin(k)-epsilon*sign(A(2,k))); p_max_(1)=p_max_(1)+A(1,k)*(z_lin(k)+epsilon*sign(A(1,k))); p_max_(2)=p_max_(2)+A(2,k)*(z_lin(k)+epsilon*sign(A(2,k))); end EUI_=[p_min_, p_max_] format compact, format short Kt_min=1/p_max(1) Kt_max=1/p_min(1) Vo_min=-p_max(2)/p_min(1) Vo_max=-p_min(2)/p_max(1) % Step 6: graphical comparison of the results z_min=min([p_max(1)*Vz0; p_min(1)*Vz0])+p_min(2); z_max=max([p_max(1)*Vz0; p_min(1)*Vz0])+p_max(2); figure, plot(z,Vz,'o', z_hat,Vz0,'-', ... z_min,Vz0,'--', z_max,Vz0,'-.', ... z_lin(1)*[1,1],[-10,10],'-',z_lin(end)*[1,1],[-10,10],'-') axis([min(z),max(z),-10,10]), grid, title('Position transducer (uncertainty region due to EUI)'), xlabel('Position{\it z} in m'), ylabel('Voltage{\it V_z} in V'), legend('Experimental data (z, V_z)_{ }^{ }', ... 'z \approx \theta_{1}^{LS} * V_{z} + \theta_2^{LS}', ... 'z \approx min(\theta_{1}^{M} * V_{z} , \theta_{1}^{m} * V_{z}) + \theta_{2}^{m}', ... 'z \approx max(\theta_{1}^{M} * V_{z} , \theta_{1}^{m} * V_{z}) + \theta_{2}^{M}', 2), text(0.015,-9,'\fontsize{20} linearity interval')
epsilon = 5.0000e-04 EUI = 1.6996e-03 1.9392e-03 2.2291e-02 2.3291e-02 EUI_ = 1.6996e-03 1.9392e-03 2.2291e-02 2.3291e-02 Kt_min = 515.6654 Kt_max = 588.3648 Vo_min = -13.7035 Vo_max = -11.4946
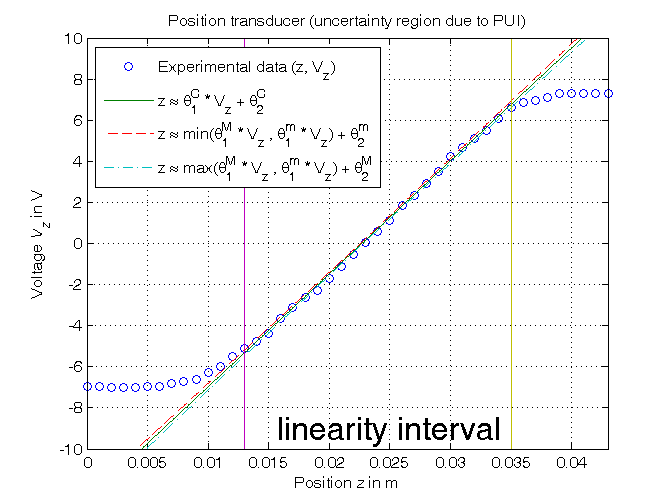
Evaluation of parameter uncertainty intervals PUI and central estimate in l-infinity norm
% Step 7: computation of the parameter uncertainty intervals PUI in l-infinity norm % PUI_LP(1,1)=[1;0]'*lp( [1;0],[Phi;-Phi],[z_lin+epsilon;-z_lin+epsilon]); % Under Matlab 5.3 % PUI_LP(2,1)=[0;1]'*lp( [0;1],[Phi;-Phi],[z_lin+epsilon;-z_lin+epsilon]); % Under Matlab 5.3 % PUI_LP(1,2)=[1;0]'*lp(-[1;0],[Phi;-Phi],[z_lin+epsilon;-z_lin+epsilon]); % Under Matlab 5.3 % PUI_LP(2,2)=[0;1]'*lp(-[0;1],[Phi;-Phi],[z_lin+epsilon;-z_lin+epsilon]); % Under Matlab 5.3 options_old=optimset('linprog'); % default value for 'Algorithm' option is 'interior-point' options_new=optimset(options_old, 'Algorithm','simplex'); PUI(1,1)=[1; 0]'*linprog( [1; 0],[Phi; -Phi],[z_lin+epsilon; -z_lin+epsilon], ... [],[],[],[],[],options_new); PUI(2,1)=[0; 1]'*linprog( [0; 1],[Phi; -Phi],[z_lin+epsilon; -z_lin+epsilon], ... [],[],[],[],[],options_new); PUI(1,2)=[1; 0]'*linprog(-[1; 0],[Phi; -Phi],[z_lin+epsilon; -z_lin+epsilon], ... [],[],[],[],[],options_new); PUI(2,2)=[0; 1]'*linprog(-[0; 1],[Phi; -Phi],[z_lin+epsilon; -z_lin+epsilon], ... [],[],[],[],[],options_new); format compact, format short e PUI format compact, format short Kt_min_PUI=1/PUI(1,2) Kt_max_PUI=1/PUI(1,1) Vo_min_PUI=-PUI(2,2)/PUI(1,1) Vo_max_PUI=-PUI(2,1)/PUI(1,2) % Step 8: computation of the central estimate format compact, format short e p_central=[(PUI(1,1)+PUI(1,2))/2; (PUI(2,1)+PUI(2,2))/2] format compact, format short Kt_central=1/p_central(1) Vo_central=-p_central(2)/p_central(1) % Step 9: graphical comparison of the results z_hat_central=p_central(1)*Vz0+p_central(2); z_min_central=min([PUI(1,2)*Vz0; PUI(1,1)*Vz0])+PUI(2,1); z_max_central=max([PUI(1,2)*Vz0; PUI(1,1)*Vz0])+PUI(2,2); figure, plot(z,Vz,'o', z_hat_central,Vz0,'-', ... z_min_central,Vz0,'--', z_max_central,Vz0,'-.', ... z_lin(1)*[1,1],[-10,10],'-',z_lin(end)*[1,1],[-10,10],'-') axis([min(z),max(z),-10,10]), grid, title('Position transducer (uncertainty region due to PUI)'), xlabel('Position{\it z} in m'), ylabel('Voltage{\it V_z} in V'), legend('Experimental data (z, V_z)_{ }^{ }', ... 'z \approx \theta_{1}^{C} * V_{z} + \theta_2^{C}', ... 'z \approx min(\theta_{1}^{M} * V_{z} , \theta_{1}^{m} * V_{z}) + \theta_{2}^{m}', ... 'z \approx max(\theta_{1}^{M} * V_{z} , \theta_{1}^{m} * V_{z}) + \theta_{2}^{M}', 2), text(0.015,-9,'\fontsize{20} linearity interval')
Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated. PUI = 1.7909e-03 1.8484e-03 2.2596e-02 2.2807e-02 Kt_min_PUI = 541.0083 Kt_max_PUI = 558.3842 Vo_min_PUI = -12.7353 Vo_max_PUI = -12.2246 p_central = 1.8196e-03 2.2702e-02 Kt_central = 549.5590 Vo_central = -12.4759
(Optional) Evaluation of an approximation of the feasible parameter set FPS
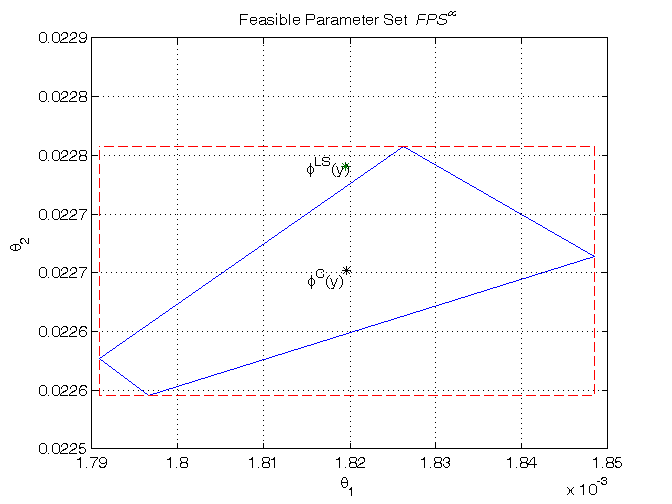
% Step 10: computation of a polytopic outer approximation of the FPS n=16; % Number of vertices of the polytope theta_vect=[]; for k=0:n-1, theta=linprog([sin(2*pi*k/n),cos(2*pi*k/n)],[Phi;-Phi],[z_lin+epsilon;-z_lin+epsilon], ... [],[],[],[],[],options_new); theta_vect=[theta_vect, theta]; end % Step 11: graphical comparison of the results k=convhull(theta_vect(1,:),theta_vect(2,:)); figure, plot(theta_vect(1,k),theta_vect(2,k),'-',p(1),p(2),'*', ... [PUI(1,1),PUI(1,:),PUI(1,2:-1:1)], [PUI(2,2:-1:1),PUI(2,:),PUI(2,2)],'--', ... p_central(1),p_central(2),'*k'), grid on, text(p(1)*0.9975,p(2),'\phi^{LS}(y)'), text(p_central(1)*0.9975,p_central(2)*0.9997,'\phi^{C}(y)'), title('Feasible Parameter Set {\it FPS^\infty}'), xlabel('\theta_{1}'), ylabel('\theta_{2}')
Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated. Optimization terminated.