Esercitazione di laboratorio #4 - Controlli Automatici
Esercizio #1: Simulazione di un DC-motor comandato in armatura e controllato in velocita'
Autori: M. Indri, M. Taragna (ultima modifica: 07/05/2020)
Contents
- Introduzione
- Passo 0: definizione del sistema DC-motor comandato in armatura
- Passo 1: simulazione in catena aperta in assenza del disturbo Td
- Passo 2: simulazione in catena aperta in presenza del disturbo Td
- Passo 3: simulazione in catena chiusa in assenza del disturbo Td
- Passo 4: simulazione in catena chiusa in presenza del disturbo Td
- Passo 5: calcolo delle f.d.t. in catena chiusa e dei diagrammi di Bode
Introduzione
Si puo' suddividere il programma in diverse sezioni di codice usando i caratteri "%%". Ogni sezione puo' essere eseguita separatamente dalle altre con il comando "Run Section" (nella toolbar dell'Editor, subito a destra del tasto "Run"). Si puo' ottenere lo stesso risultato selezionando la porzione di codice che si vuole eseguire e premendo il tasto funzione F9, risparmiando cosi' tempo rispetto all'esecuzione di tutto il programma. Si prenda questo script come esempio di riferimento.
clear all, close all, clc
Passo 0: definizione del sistema DC-motor comandato in armatura
% Parametri del motore elettrico Ra=1; La=6e-3; Km=0.5; J=0.1; b=0.02; Ka=10; s=tf('s'); F1=Ka*Km/((s*La+Ra)*(s*J+b)+Km^2) F2=-(s*La+Ra)/((s*La+Ra)*(s*J+b)+Km^2)
F1 =
5
----------------------------
0.0006 s^2 + 0.1001 s + 0.27
Continuous-time transfer function.
F2 =
-0.006 s - 1
----------------------------
0.0006 s^2 + 0.1001 s + 0.27
Continuous-time transfer function.
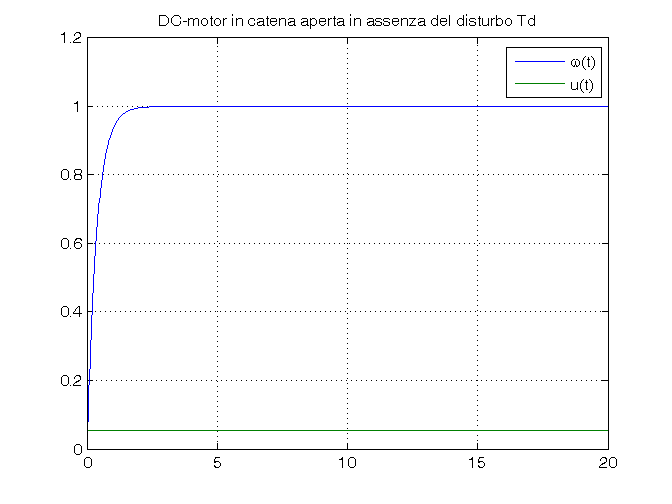
Passo 1: simulazione in catena aperta in assenza del disturbo Td
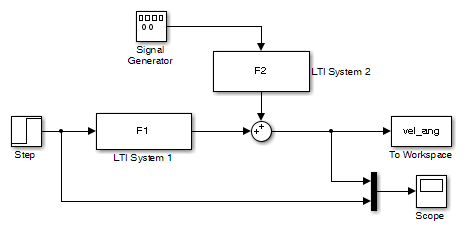
Td_amp=0 open_system('es_motore_no_controllo_velocita') sim('es_motore_no_controllo_velocita') w_rif=1/dcgain(F1)*ones(size(tout)); figure, plot(tout,vel_ang, tout,w_rif), grid on, ylim([0,1.2]), title('DC-motor in catena aperta in assenza del disturbo Td'), legend('\omega(t)','u(t)')
Td_amp =
0
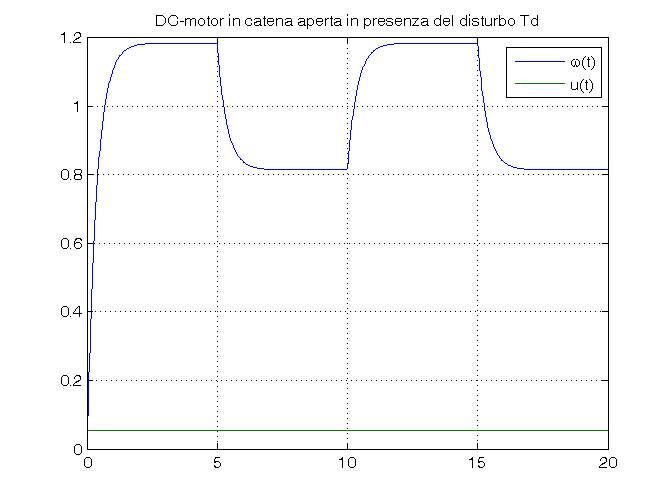
Passo 2: simulazione in catena aperta in presenza del disturbo Td
Td_amp=0.05 sim('es_motore_no_controllo_velocita') w_rif=1/dcgain(F1)*ones(size(tout)); figure, plot(tout,vel_ang, tout,w_rif), grid on, ylim([0,1.2]), title('DC-motor in catena aperta in presenza del disturbo Td'), legend('\omega(t)','u(t)') close_system('es_motore_no_controllo_velocita')
Td_amp =
0.0500
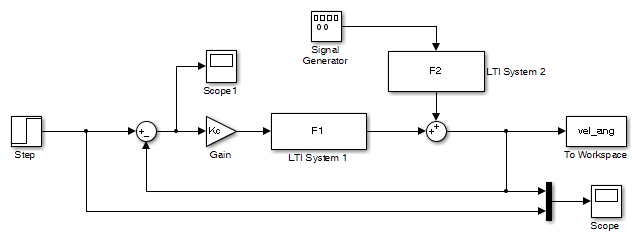
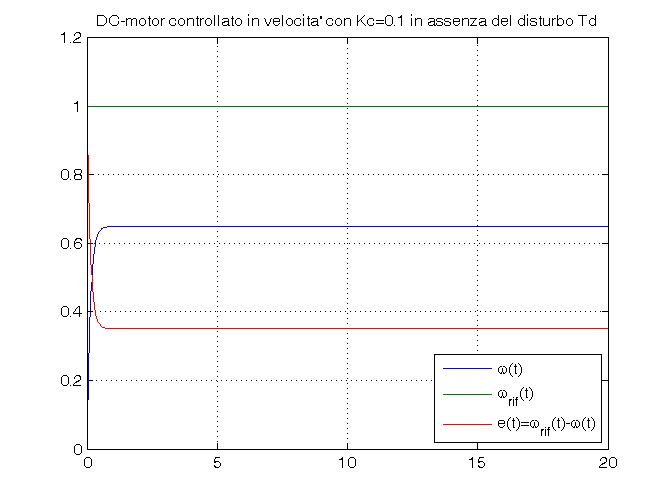
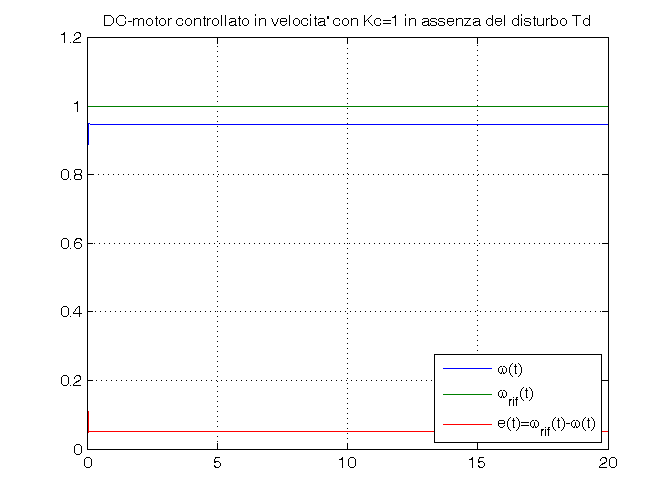
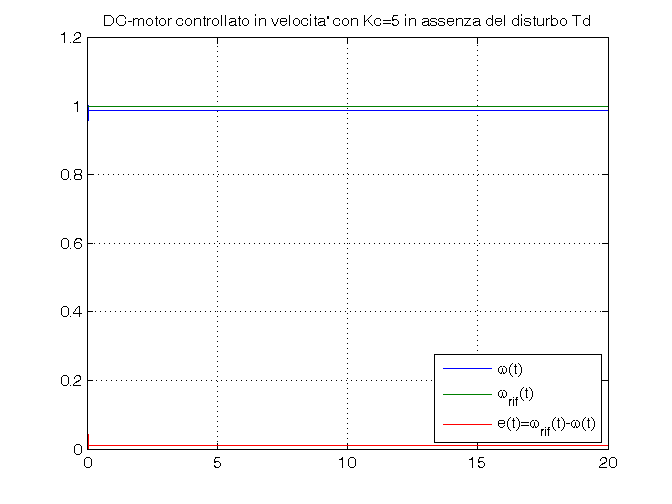
Passo 3: simulazione in catena chiusa in assenza del disturbo Td
Td_amp=0 Kc_vec=[0.1, 1, 5]; open_system('es_motore_con_controllo_velocita') for Kc=Kc_vec, sim('es_motore_con_controllo_velocita') w_rif=ones(size(tout)); errore=w_rif-vel_ang; figure, plot(tout,vel_ang, tout,w_rif, tout,errore), grid on, ylim([0,1.2]), title(['DC-motor controllato in velocita'' con Kc=', num2str(Kc), ... ' in assenza del disturbo Td']), legend('\omega(t)','\omega_{rif}(t)','e(t)=\omega_{rif}(t)-\omega(t)',4) end
Td_amp =
0
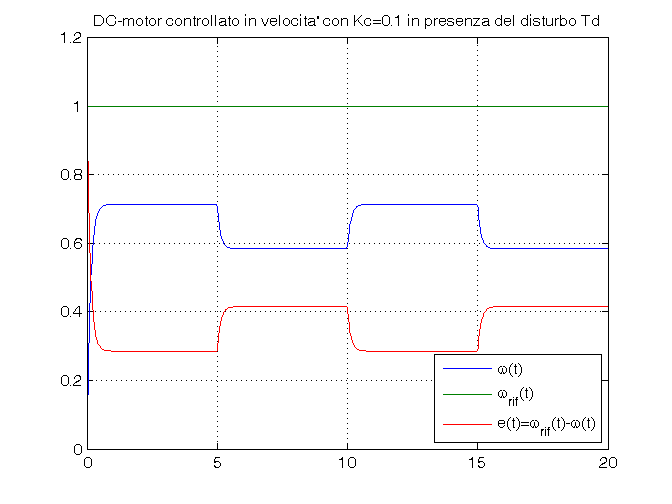
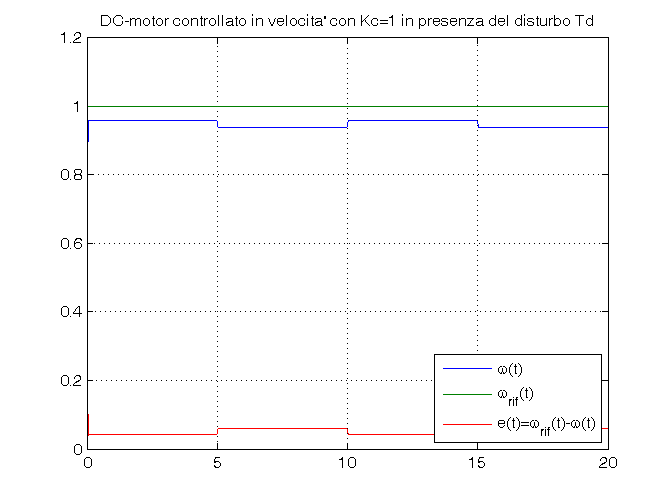
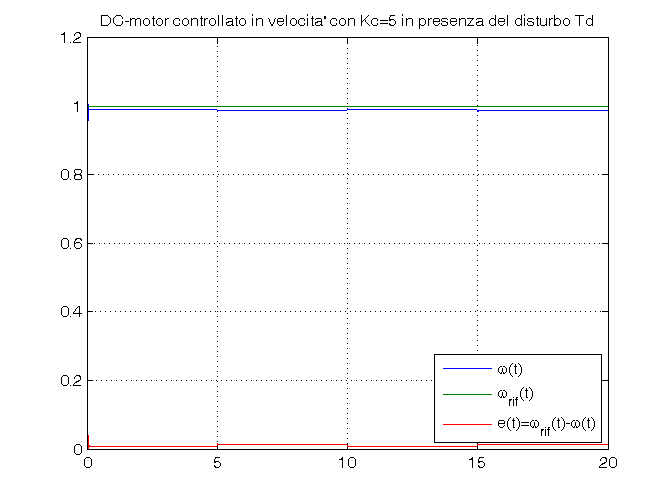
Passo 4: simulazione in catena chiusa in presenza del disturbo Td
Td_amp=0.05 for Kc=Kc_vec, sim('es_motore_con_controllo_velocita') w_rif=ones(size(tout)); errore=w_rif-vel_ang; figure, plot(tout,vel_ang, tout,w_rif, tout,errore), grid on, ylim([0,1.2]), title(['DC-motor controllato in velocita'' con Kc=', num2str(Kc), ... ' in presenza del disturbo Td']), legend('\omega(t)','\omega_{rif}(t)','e(t)=\omega_{rif}(t)-\omega(t)',4) end close_system('es_motore_con_controllo_velocita')
Td_amp =
0.0500
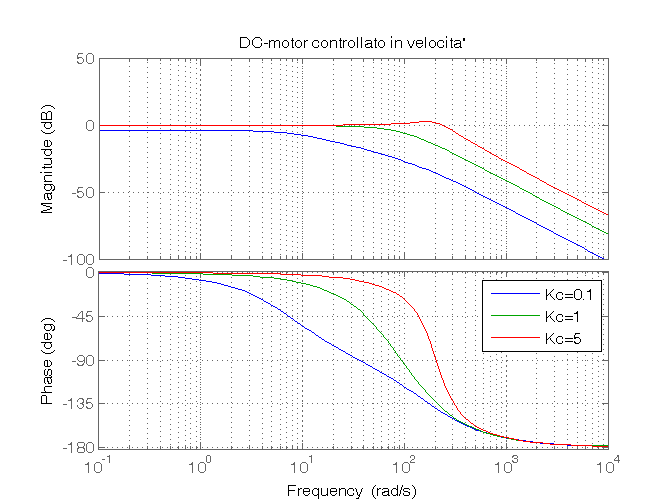
Passo 5: calcolo delle f.d.t. in catena chiusa e dei diagrammi di Bode
figure for Kc=Kc_vec, Kc W=feedback(Kc*F1,1) z_W=zero(W) p_W=pole(W) damp(W) bode (W), grid on, xlim([1e-1, 1e4]), hold on, title('DC-motor controllato in velocita''') end legend(['Kc=',num2str(Kc_vec(1))],['Kc=',num2str(Kc_vec(2))],['Kc=',num2str(Kc_vec(3))])
Kc =
0.1000
W =
0.5
----------------------------
0.0006 s^2 + 0.1001 s + 0.77
Continuous-time transfer function.
z_W =
Empty matrix: 0-by-1
p_W =
-158.7844
-8.0822
Pole Damping Frequency Time Constant
(rad/seconds) (seconds)
-8.08e+00 1.00e+00 8.08e+00 1.24e-01
-1.59e+02 1.00e+00 1.59e+02 6.30e-03
Kc =
1
W =
5
----------------------------
0.0006 s^2 + 0.1001 s + 5.27
Continuous-time transfer function.
z_W =
Empty matrix: 0-by-1
p_W =
-83.4333 +42.6874i
-83.4333 -42.6874i
Pole Damping Frequency Time Constant
(rad/seconds) (seconds)
-8.34e+01 + 4.27e+01i 8.90e-01 9.37e+01 1.20e-02
-8.34e+01 - 4.27e+01i 8.90e-01 9.37e+01 1.20e-02
Kc =
5
W =
25
-----------------------------
0.0006 s^2 + 0.1001 s + 25.27
Continuous-time transfer function.
z_W =
Empty matrix: 0-by-1
p_W =
1.0e+02 *
-0.8343 + 1.8750i
-0.8343 - 1.8750i
Pole Damping Frequency Time Constant
(rad/seconds) (seconds)
-8.34e+01 + 1.87e+02i 4.07e-01 2.05e+02 1.20e-02
-8.34e+01 - 1.87e+02i 4.07e-01 2.05e+02 1.20e-02